

|
| Τροποποιημένο: | 1 |
| Τιμή: | US $3500.00 - 4880.00/ Set |
| τυποποιημένη συσκευασία: | Κουτί από χαρτόνι/Ξύλινο τελάρο |
| Προθεσμία παράδοσης: | 6-8 εβδομάδες |
| Μέθοδος πληρωμής: | T/T |
| Ικανότητα εφοδιασμού: | 500 σετ ετησίως |
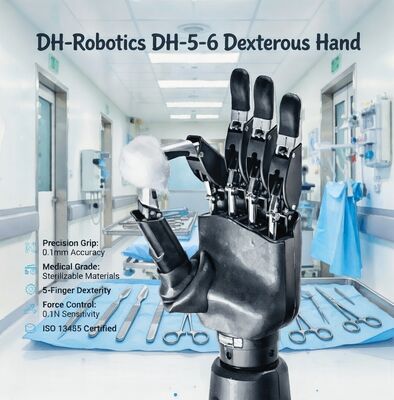
Το DH-5-6 από την DH-Robotics είναι ένα ρομποτικό χέρι με 5 δάχτυλα και 6 ενεργά DOF, κατασκευασμένο για ανθρωποειδή ρομπότ, συνεργατικές εφαρμογές και έρευνα.Χρησιμοποιεί ενεργοποίηση που οδηγείται από τένοντα με μικρογραμμικούς ενεργοποιητές και υποστηρίζει την αντίληψη δύναμης / αφής για ασφαλή και ακριβή λαβήΤο προϊόν δίνει έμφαση στην οικονομική απόδοση ενώ παράγει ανθρώπινη επιδεξιότητα.
| Παράμετρος | Προδιαγραφές |
|---|---|
| Δάχτυλα | 5 δάχτυλα (ανθρωποειδή) |
| Ενεργός DOF | 6 |
| Συνολικές αρθρώσεις | 12 |
| Ενεργοποίηση | Με κινητήρα τένοντα (μικρογραμμικοί ενεργοποιητές) |
| Ανίχνευση | Αισθητήρες δύναμης / αφής |
| Τρόπος ελέγχου | Υβρίδιο θέσης-δύναμης |
| Επικοινωνία | CAN / RS485 / EtherCAT |
| Βάρος | Περίπου 400-550 g |
| Δύναμη πρόσφυσης (ανά δάχτυλο) | Τυπικό 5 ̊15 N |
Παρακαλώ στείλτε μας:
|
|
| Τροποποιημένο: | 1 |
| Τιμή: | US $3500.00 - 4880.00/ Set |
| τυποποιημένη συσκευασία: | Κουτί από χαρτόνι/Ξύλινο τελάρο |
| Προθεσμία παράδοσης: | 6-8 εβδομάδες |
| Μέθοδος πληρωμής: | T/T |
| Ικανότητα εφοδιασμού: | 500 σετ ετησίως |
Το DH-5-6 από την DH-Robotics είναι ένα ρομποτικό χέρι με 5 δάχτυλα και 6 ενεργά DOF, κατασκευασμένο για ανθρωποειδή ρομπότ, συνεργατικές εφαρμογές και έρευνα.Χρησιμοποιεί ενεργοποίηση που οδηγείται από τένοντα με μικρογραμμικούς ενεργοποιητές και υποστηρίζει την αντίληψη δύναμης / αφής για ασφαλή και ακριβή λαβήΤο προϊόν δίνει έμφαση στην οικονομική απόδοση ενώ παράγει ανθρώπινη επιδεξιότητα.
| Παράμετρος | Προδιαγραφές |
|---|---|
| Δάχτυλα | 5 δάχτυλα (ανθρωποειδή) |
| Ενεργός DOF | 6 |
| Συνολικές αρθρώσεις | 12 |
| Ενεργοποίηση | Με κινητήρα τένοντα (μικρογραμμικοί ενεργοποιητές) |
| Ανίχνευση | Αισθητήρες δύναμης / αφής |
| Τρόπος ελέγχου | Υβρίδιο θέσης-δύναμης |
| Επικοινωνία | CAN / RS485 / EtherCAT |
| Βάρος | Περίπου 400-550 g |
| Δύναμη πρόσφυσης (ανά δάχτυλο) | Τυπικό 5 ̊15 N |
Παρακαλώ στείλτε μας:

