

|
|
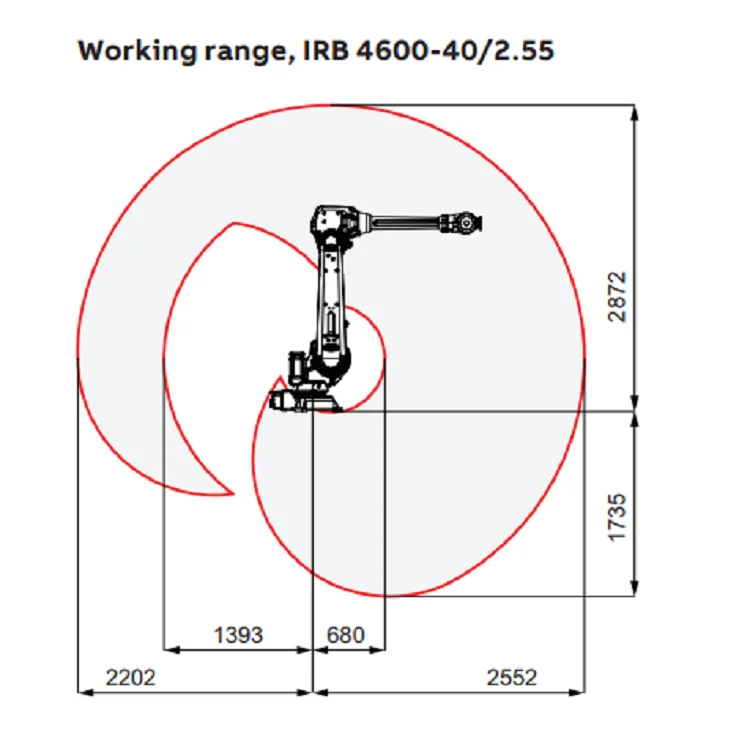
Το ρομπότ βραχιόνων IRB4600 CNC ρομπότ ABB με την ηλεκτρική πένσα για την επιλογή και η θέση λειτουργούν με την κάμπτοντας μηχανή

| Έκδοση ρομπότ | Επανάληψη RP θέσης (χιλ.) | Επανάληψη RT πορειών (χιλ.) * |
| IRB 4600 60/2.05 | 0,06 | 0,46 |
| IRB 4600 45/2.05 | 0,05 | 0,13 |
| IRB 4600 40/2.55 | 0,06 | 0,28 |
| IRB 4600 20/2.50 | 0,05 | 0,17 |
| Εκδόσεις ρομπότ | Προσιτότητα (μ) | Ωφέλιμο φορτίο (κλ) | Armload (κλ) | |
| IRB 4600 60/2.05 | 2.05 | 60 | 20 | |
| IRB 4600 45/2.05 | 2.05 | 45 | 20 | |
| IRB 4600 40/2.55 | 2.55 | 40 | 20 | |
| IRB 4600 20/2.50 | 2.51 | 20 | 11 | |
| Αριθμός αξόνων | 6+3 εξωτερικά (μέχρι 36 με MultiMove) | |||
| Προστασία | Τυποποιημένο IP67, ως χυτήριο επιλογής συν 2 | |||
| Μοντάρισμα | Πάτωμα, ράφι, που αναστρέφεται ή που γέρνουν | |||
| Ελεγκτής | IRC5 ενιαίο γραφείο, | |||

|
|
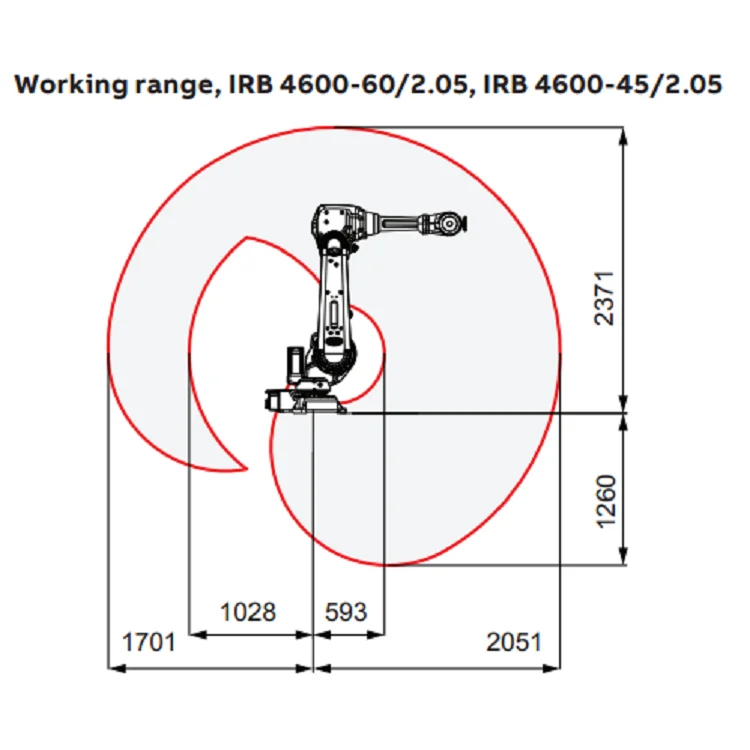
Το ρομπότ βραχιόνων IRB4600 CNC ρομπότ ABB με την ηλεκτρική πένσα για την επιλογή και η θέση λειτουργούν με την κάμπτοντας μηχανή
| Έκδοση ρομπότ | Επανάληψη RP θέσης (χιλ.) | Επανάληψη RT πορειών (χιλ.) * |
| IRB 4600 60/2.05 | 0,06 | 0,46 |
| IRB 4600 45/2.05 | 0,05 | 0,13 |
| IRB 4600 40/2.55 | 0,06 | 0,28 |
| IRB 4600 20/2.50 | 0,05 | 0,17 |
| Εκδόσεις ρομπότ | Προσιτότητα (μ) | Ωφέλιμο φορτίο (κλ) | Armload (κλ) | |
| IRB 4600 60/2.05 | 2.05 | 60 | 20 | |
| IRB 4600 45/2.05 | 2.05 | 45 | 20 | |
| IRB 4600 40/2.55 | 2.55 | 40 | 20 | |
| IRB 4600 20/2.50 | 2.51 | 20 | 11 | |
| Αριθμός αξόνων | 6+3 εξωτερικά (μέχρι 36 με MultiMove) | |||
| Προστασία | Τυποποιημένο IP67, ως χυτήριο επιλογής συν 2 | |||
| Μοντάρισμα | Πάτωμα, ράφι, που αναστρέφεται ή που γέρνουν | |||
| Ελεγκτής | IRC5 ενιαίο γραφείο, | |||


