

|
|
βιομηχανικός cnc άξονα βραχιόνων ABB IRB4400 6 ρομπότ ζωγραφικής βραχίονας ρομπότ με το γραμμικό ιχνηλάτη και το ρομποτικό γραμμικού ιχνηλάτη κάλυψης και

| Έκδοση ρομπότ | Προσιτότητα (μ) | Ωφέλιμο φορτίο (κλ) | ||
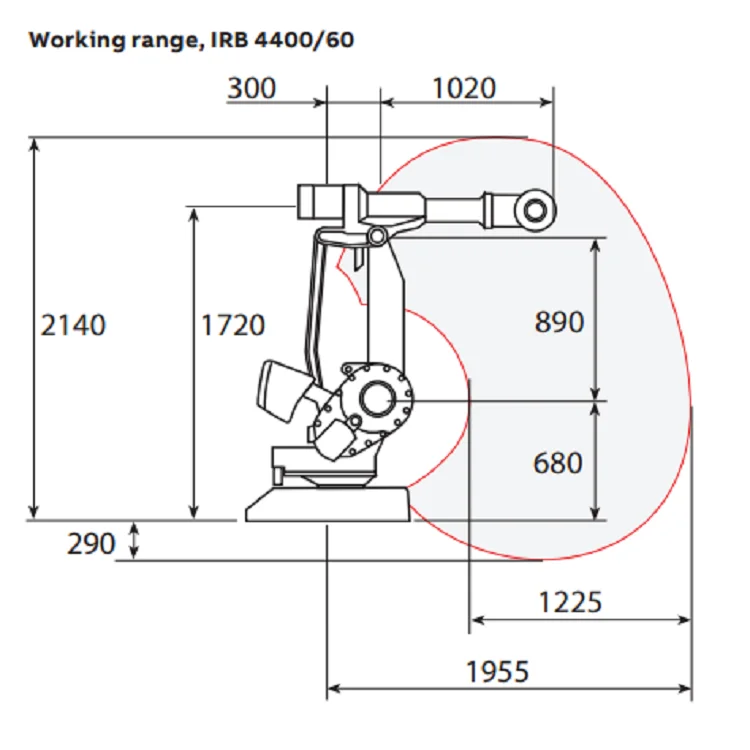
| IRB 440060/1.96 | 1.96 | 60 | ||
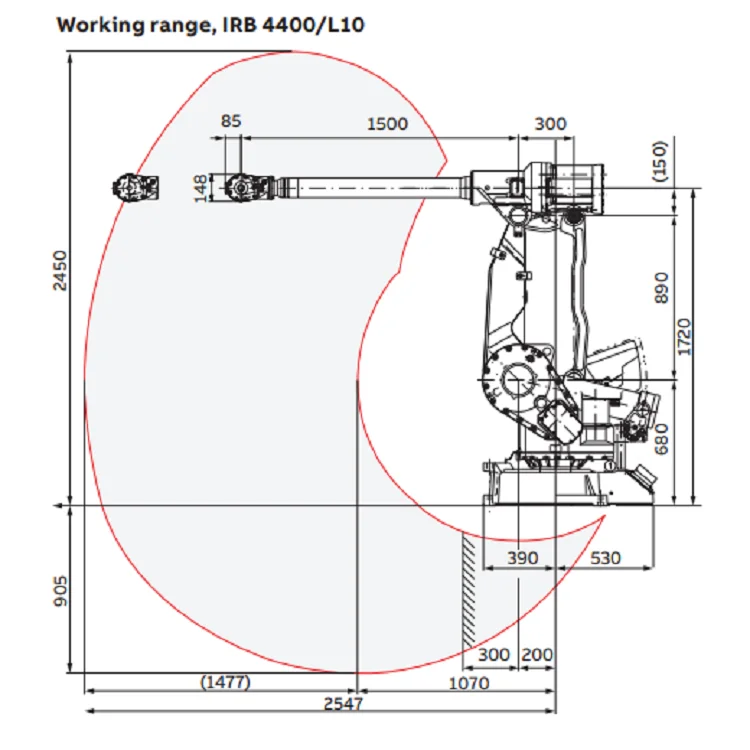
| IRB 4400L-10/2.53 | 2.53 | 10 | ||
| Συμπληρωματικό φορτίο | ||||
| στον άξονα 2 | 35 κλ | |||
| στον άξονα 3 | 15 κλ | |||
| στον άξονα 4 | 0-5 κλ | |||
| Αριθμός αξόνων | 6 | |||
| Προστασία | Τυποποιημένη έκδοση IP 54, χυτήριο συν 2 IP 67 και υψηλός ατμός washable | |||
| Μοντάρισμα | Πάτωμα | |||
| Ελεγκτής | IRC5 ενιαίο γραφείο | |||
| Ενσωματωμένος ανεφοδιασμός σημάτων | 23 σήματα και δύναμη 10 στον ανώτερο βραχίονα | |||
| Ενσωματωμένη παροχή αέρα | Μέγιστος φραγμός 8 στον ανώτερο βραχίονα | |||
| Έκδοση ρομπότ | Επανάληψη RP θέσης (χιλ.) | Επανάληψη RT πορειών (χιλ.) *: |
| IRB 440060/1.96 | 0,06 | 0,09 |
| IRB 4400L-10/2.53 | 0,05 | 0,16 |

|
|
βιομηχανικός cnc άξονα βραχιόνων ABB IRB4400 6 ρομπότ ζωγραφικής βραχίονας ρομπότ με το γραμμικό ιχνηλάτη και το ρομποτικό γραμμικού ιχνηλάτη κάλυψης και
| Έκδοση ρομπότ | Προσιτότητα (μ) | Ωφέλιμο φορτίο (κλ) | ||
| IRB 440060/1.96 | 1.96 | 60 | ||
| IRB 4400L-10/2.53 | 2.53 | 10 | ||
| Συμπληρωματικό φορτίο | ||||
| στον άξονα 2 | 35 κλ | |||
| στον άξονα 3 | 15 κλ | |||
| στον άξονα 4 | 0-5 κλ | |||
| Αριθμός αξόνων | 6 | |||
| Προστασία | Τυποποιημένη έκδοση IP 54, χυτήριο συν 2 IP 67 και υψηλός ατμός washable | |||
| Μοντάρισμα | Πάτωμα | |||
| Ελεγκτής | IRC5 ενιαίο γραφείο | |||
| Ενσωματωμένος ανεφοδιασμός σημάτων | 23 σήματα και δύναμη 10 στον ανώτερο βραχίονα | |||
| Ενσωματωμένη παροχή αέρα | Μέγιστος φραγμός 8 στον ανώτερο βραχίονα | |||
| Έκδοση ρομπότ | Επανάληψη RP θέσης (χιλ.) | Επανάληψη RT πορειών (χιλ.) *: |
| IRB 440060/1.96 | 0,06 | 0,09 |
| IRB 4400L-10/2.53 | 0,05 | 0,16 |

